Rotary Encoder, digunakan untuk mengubah gerakan linear atau putaran menjadi sinyal digital, dimana sensor putaran memonitor gerakan putar dari suatu alat. Sensor ini biasanya terdiri dari 2 lapis jenis penyandi, yaitu; Pertama, Penyandi rotari tambahan (yang mentransmisikan jumlah tertentu dari pulsa untuk masing-masing putaran) yang akan membangkitkan gelombang kotak pada objek yang diputar. Kedua, Penyandi absolut (yang memperlengkapi kode binary tertentu untuk masing-masing posisi sudut).
Secara umum prinsip kerja rotary encoder dapat diilustrasikan seperti dalam gambar berikut ini (pitowarno, 2006:68 – Robotika : Disain, Kontrol, dan kecerdasan Buatan.).
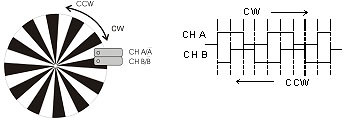
Prinsip Kerja Rotary Encoder
Dua buah sensor optis (chanel A/A dan chanel B/B ) pendeteksi “hitam dan putih” digunakan digunakan sebagai acuan untuk menentukan arah gerakan. Searah jarum jam (clock-wise. CW atau berlawanan arah jarum jam (counter clock-wise. CCW). Sedangkan jumlah pulsa (baik A atau B) dapat dihitung (menggunakan prinsip counter) sebagai banyak langkah yang ditempuh. Dengan demikian arah gerakan dan posisi dapat dideteksi dengan baik oleh rotary encoder.
Biasanya encoder dipasang segaris dengan poros (shaft) motor, gearbox, sendi atau bagian berputar lainnya. Beberapa tipe encoder memiliki poros berlubang (hollow shaft encoder) yang didesain untuk system sambungan langsung ke poros obyek dideteksi.
Tidak ada komentar:
Posting Komentar